实验方法:
本实验主要针对进入机器人专业和临床医学专业,考核方式主要为线上认知测评和线下教学实验室操作考核,重点考察各项技能要点的掌握情况,对辅助康复知识的基本技能要点进行系统量化考核。康复机器人典型应用案例包括针对不同瘫痪等级的患者设计了被动训练、主动训练、阻抗训练、无约束训练等多种训练方式。利用软件的动画仿真功能在各个工作站中集成了夹具动作、康复姿态、周边设备动作等多种动画,使得康复机器人工作站高度仿真现实的工作任务和工作场景,从而使学生能全面掌握相关康复机器人的应用与安装、配置与调试技巧,让学生通过典型的实验仿真,掌握康复机器人的应用方法与技巧。
虚拟现实的建模可以通过虚拟现实建模语言(VRML)建模, 大多数 VR模型的建立是通过(VRML)语言在编辑器界面下直接建模,(VRML)最基本的组成要素是节点, 节点是对客观世界中物体、位置、对象、文本、声音、空间场景及颜色等所有一切的描述, 每一种命令都有其本身的节点语法, 将所有节点编辑后形成节点集。简单的模型可以通过这一传统方法建模,但在机械工程领域中大多数模型结构是非常复杂的,不是简单模型的罗列, 各零件间又有装配要求, 导致了用 VRML直接建模的复杂程度。所以, 结合三维绘图软件建模的方法是简单可行的。在 Pro/E运行环境下建立模型三维图形,将导出的模型导入到 3DSMAX, 导入时可以适当增加平滑角度, 以增加视觉感染力, 在3DSMAX下根据具体要求对模型进行相应的编辑(如 :修饰、渲染、纹理等), 使模型更加美观逼真, 导出3DS文件, 最后将3DS文件在编辑器中打开,生成VRML文件。
实验步骤:
(1)学生交互性操作步骤,共 10 步
步骤序号 |
步骤目标要求 |
步骤合理用时 |
目标达成度赋分模型 |
步骤满分 |
成绩类型 |
1 |
登录 |
2s |
A |
10 |
R操作成绩 R实验报告 £预习成绩 R教师评价报告 |
2 |
打开上下肢电源,根据说明及指示灯操作 |
5s |
A+ |
10 |
3 |
检查急停开关,确保使用安全 |
5s |
A |
10 |
4 |
打开机器人运行控制程序,根据要求操作 |
10s |
A |
10 |
5 |
做好准备启动工作 |
5s |
A |
10 |
6 |
选择控制模式 |
10s |
A |
10 |
7 |
进行机器人前后左右及启停的仿真控制 |
15s |
A |
10 |
8 |
根据要求,选择不同模式 |
10s |
A+ |
10 |
9 |
进行动力学和运动学仿真完成姿态控制、路径规划、轨迹跟踪 |
20s |
A+ |
10 |
10 |
紧急情况下立即制动,进行实验数据统计和分析 |
10s |
A |
10 |
(2)交互性步骤详细说明
1.系统首页有智能辅助康复设备虚拟仿真实验室,学生登录实验平台,选择相应的实验项目进行仿真实验。

图6 学生学习课程界面
图7 虚拟仿真实验实操界面
2.打开虚拟康复机器人上下肢电源,观察电源指示灯和欠压指示灯,电源指示灯在线路正常的情况下会亮,当检测到电池电压低于22.5V,欠压指示灯会亮,蜂鸣器报警,提示用户充电,电池电压高于24.5V,将退出报警。
3.检查机器人急停开关,确保处于拔起状态。
4.打开Driver Demo程序运行,选择康复机器人上连接的CAN通讯模块型号,可进入机器人程序的控制界面。
5.点击“连接设备”按钮,显示“连接成功”后,点击“启动设备”按钮。
6.选择“速度闭环”或“位置闭环”控制模式(建议采用“速度闭环”控制模式)。若选择“速度闭环”模式,则需要输入X轴速度,Y轴速度及Z轴速度参数,X轴速度限定值为1.0m/s , Y轴速度限定值为1.0 m/s, Z轴最大速度为90deg/s ;若选择“位置闭环”模式,则需要输入X轴位移(对应左轮位移),Y轴位移(对应右轮位移)。
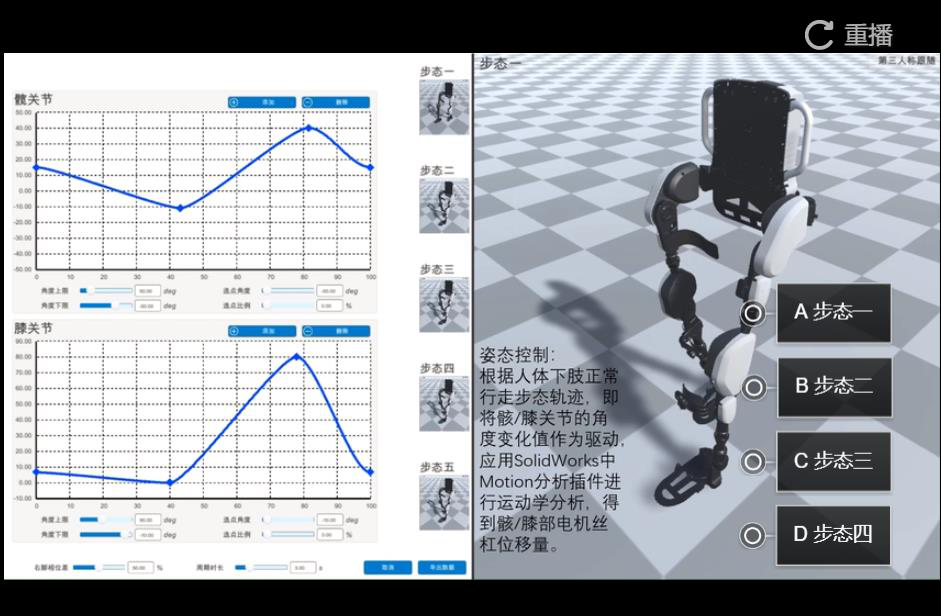
图8 康复姿态控制模式
7.单击“前进”按钮或键盘敲击“W”控制机器人前进;单击“后退”按钮或键盘敲击“S”控制机器人后退;单击“左转”按钮或键盘敲击“R”控制机器人左转;单击“右转”按钮或键盘敲击“T”控制机器人左转;单击“停止”按钮或键盘敲击空格键,控制机器人停止运动。
8.根据不同层次实验教学的需求,学生选择设计单关节或多关节康复机器人。
9.康复机器人运动过程中其姿态由各关节执行器转动的角度所反映。高精度的康复机器人关节执行器控制是康复机器人可靠运动的重要前提。该实验环节分为单关节康复机器人姿态控制和多关节康复机器人姿态控制实验。单关节康复机器人姿态控制实验面向本科低年级学生,实验内容属于基础训练层。单关节康复机器人仅包含下肢和上肢的一个关节。学生需结合设定的电机模型,设计运动控制系统,运用比例积分微分(PID)控制算法对电机进行控制,保证关节的运动响应满足要求。
多关节康复机器人姿态控制实验面向本科高年级学生,实验内容属于综合设计层。多关节康复机器人包含2个及以上关节。学生需选择关节数量,建立康复机器人运动学模型,解析机器人在特定康复状态下各个关节的姿态信息。在此基础上,要求学生在单关节姿态控制的基础上设计多关节协同控制方案,实现多关节康复机器人的姿态控制。
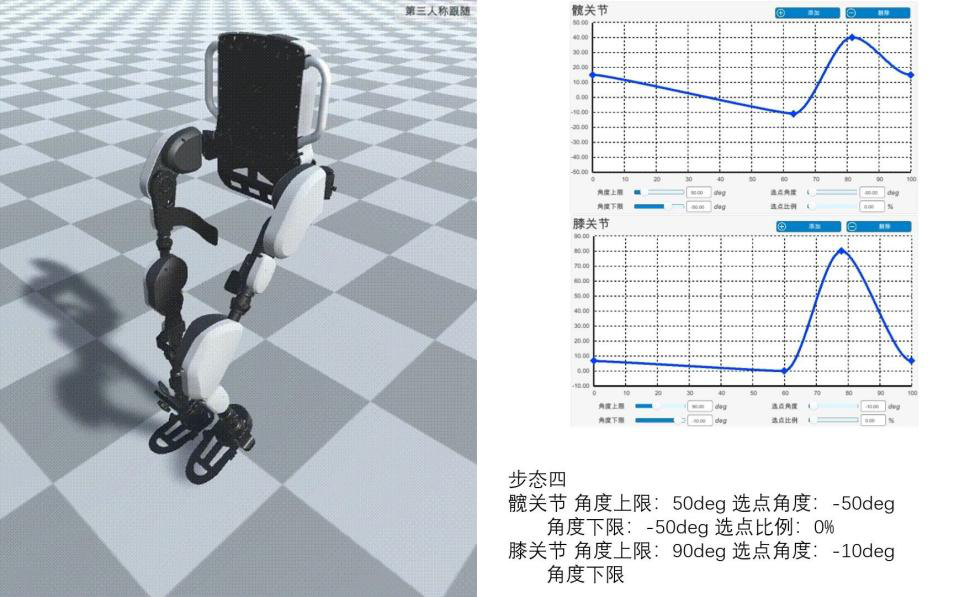
图9 多关节康复机器人姿态选择
10.康复机器人动力学研究是机器人学中最重要的一部分,它建立在运动学研究的基础上,是对机器人进行控制研究的前提。运动学研究主要针对机器人的结构及其运动轨迹规划上,包括刚体运动的位移、速度等变量,使得刚体产生加速度的根本原因就是对刚体施加了一定的力或力矩,而动力学研究主要分析刚体之间的受力情况以及关节力矩问题。分析下肢机器人在运动过程中的动力学特性,包括刚体质量、加速度、转动惯量以及负载对系统的影响,能够帮助我们对整个机器人结构进行优化以及为后续控制平台的搭建提供了设计依据。路径规划作为机器人学的一个基本问题,是基于运动学模型对机器人末端执行器进行空间路径控制的前提。该实验步骤在分析机器人工作空间的基础上,在已知康复机器人起点、目标点和每个康复姿态价值的前提下,规划康复机器人移动路径,使得康复机器人在规定时间内,从起点运动到目标点时获得的康复效果最高。
11.该实验步骤为学生提供康复仿真环境、开放模型导入接口及控制算法设计接口。学生可充分发挥创新能力,设计其他类型康复机器人或非康复机器人的结构模型,将其导入康复虚拟仿真环境并设计控制方案,最终完成姿态控制、路径规划、轨迹跟踪等任务。
12.若出现紧急情况时,务必按下紧急停机按钮。
13.实验结果的分数统计。
 设为首页
设为首页  加入收藏
加入收藏
