实验内容:
(1)实验原理
人体下肢通过神经系统控制骨骼肌的收缩驱动各关节的运动,从而实现下肢各种比较复杂的运动。如人体下肢的前后行走的周期性行为和跳跃、奔跑等非周期性行为,其中下肢步行运动是设计下肢步态训练康复机器人的基本运动形式。一个完整的双足步行运动周期由两个状态组成:支撑状态和单腿摆动状态,支撑状态表示人体下肢站立在地面上的状态,单腿摆动状态表示人体下肢在空中摆动的状态。下肢步态康复训练机器人协助患者进行步态行走,患者可根据病情恢复情况改变机器人的训练模式,即由被动控制训练阶段到主动控制训练阶段。减重系统即患者通过穿戴减重机构与训练者上方的悬挂系统连接,使得患者大部分重量由减重系统承担,只有患肢的重量依附于下肢步态康复训练机器人进行步态运动。跑步机是在下肢步态康复训练机器人研究后期,为了使患者在跑步机上快速行走或者跑步提供的实验平台。跑步机右侧为控制柜,便于治疗师用来控制下肢步态康复训练机器人运动。下肢机器人后方的托盘可进行上下调整,作用于患者背部,提供一定的支撑力。
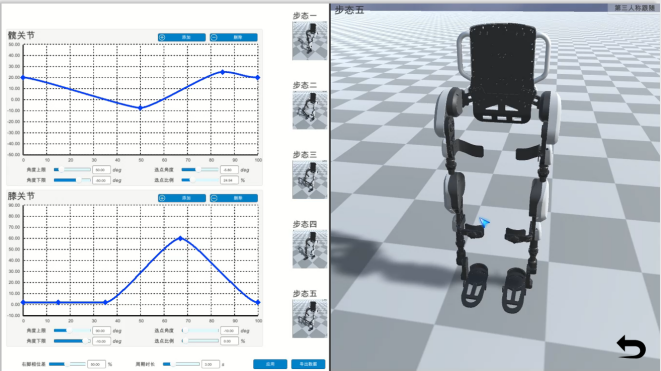
图1 康复机器人虚拟仿真实验环境
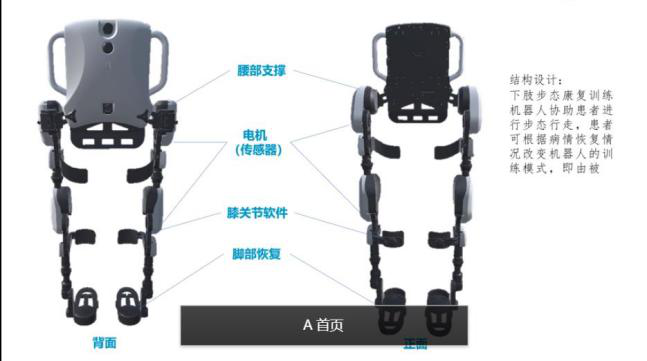
图2 康复机器人结构设计
通过康复机器人学的数学理论即位姿描述和坐标变换,建立下肢康复机器人平面杆件结构模型,运用D-H法在MATLAB中建立了下肢机器人运动学模型,即表示出各关节点坐标系的转换矩阵,进一步推导出膝关节运动轨迹公式和踩关节运动轨迹公式。根据人体下肢正常行走步态轨迹,即将骸/膝关节的角度变化值作为驱动,应用SolidWorks中Motion分析插件进行运动学分析,得到骸/膝部电机丝杠位移量。将丝杠位移量作为运动理论模型的驱动信号,计算可得到膝关节的运动轨迹和踩关节的运动轨迹。在动画制作中,需要给相应装配体添加运动驱动或者直接通过手动的方式拖动想要运动的装配体零件,从而达到我们想要的动画效果。通过复制或者将键码放置在相应的时间点,然后拖动运动的物体,将自动生成相应动作。在进行基本运动分析时,需要给装配体添加质量参数,并在关节驱动处添加马达、接触等激励信号,即可进行基本运动分析。

图3 康复机器人姿态控制
机器人动力学研究是机器人学中最重要的一部分,它建立在运动学研究的基础上,是对机器人进行控制研究的前提。运动学研究主要针对机器人的结构及其运动轨迹规划上,包括刚体运动的位移、速度等变量,使得刚体产生加速度的根本原因就是对刚体施加了一定的力或力矩,而动力学研究主要分析刚体之间的受力情况以及关节力矩问题。分析下肢机器人在运动过程中的动力学特性,包括刚体质量、加速度、转动惯量以及负载对系统的影响,能够帮助我们对整个机器人结构进行优化以及为后续控制平台的搭建提供了设计依据。与运动学研究类似,根据研究对象的不同动力学研究也包含正逆问题。若要求解正动力学问题,首先要明确机器人各个机构的运动参量,根据牛顿力学来求解刚体所受力或关节力矩大小;而逆动力学问题与之相反,是给机器人施加一定的力或力矩驱动,求解其动态特性的过程。
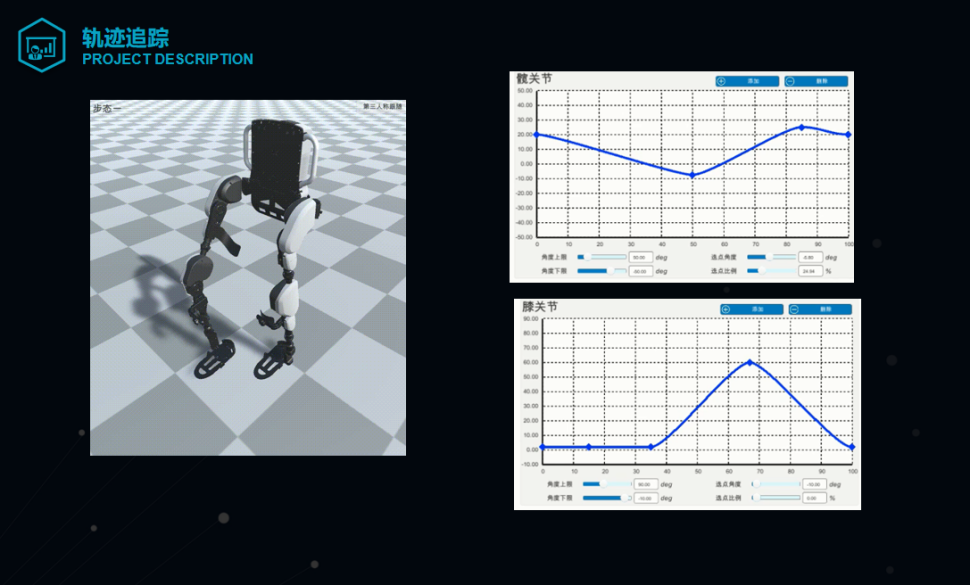
图4 康复机器人轨迹跟踪
目前下肢步态康复训练机器人主要分为“主动”训练模式和“被动”训练模式,患者在康复初期,步伐动作较慢,需要较长时间完成一个步态周期,通常采用“被动”模式训练患者。在“被动”模式中,患者的运动完全由机器人控制。此时下肢机器人只进行简单的轨迹跟踪,使患肢按照机器人预定的位移、速度等参量动作。随着患肢的康复,患者自身意识会对机器人产生力和力矩作用,这时候需要通过“主动”模式来训练。此时机器人不仅要满足患肢按照一定位移、速度运动,还要控制好机器人对患者产生力的作用。为了获得适合患者的步行数据,包括步距、步态周期等。很多学者制定了不同的控制策略,来满足患者不同训练需求。最常用的控制算法有PID控制算法、模糊控制算法、自适应控制算法、神经网络控制算法以及阻抗控制算法。本实验项目采用计算力矩加PD反馈控制的方法,它是一种基于系统动力学模型实时补偿的控制算法,弥补了动力学模型的不准确性,使机器人的运动关节角位移或力矩能够很好地跟踪期望轨迹。该实验环节为学生提供康复虚拟仿真环境、开放模型导入接口及控制算法设计接口。学生可充分发挥创新能力,设计其他类型康复仿生机器人或非仿生康复机器人的结构模型,将其导入康复仿真环境并设计控制方案,最终完成姿态控制、路径规划、轨迹跟踪等任务。
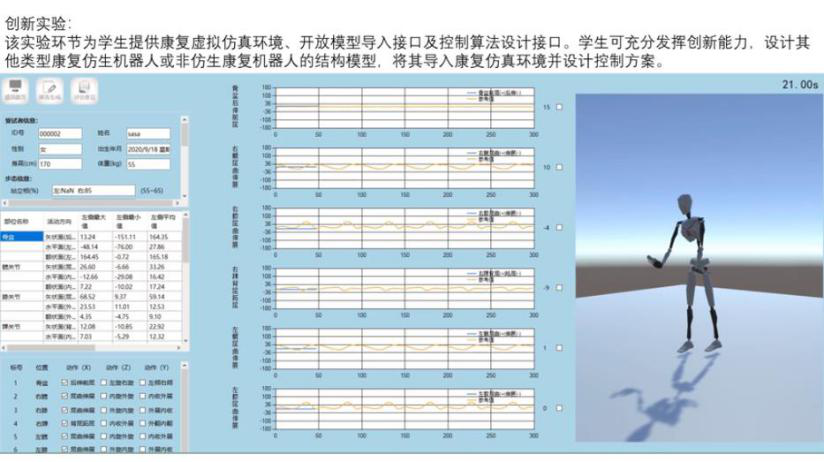
图5 探索创新实验
知识点:共 4 个
1.康复环境与仿生机器人结构设计
2.康复仿生机器人姿态控制
3.康复仿生机器人轨迹跟踪
4.康复机器人探索创新实验
(2)核心要素仿真设计
1)康复机器控制系统工作原理
根据远程治疗过程中对康复机器控制参数调整和对机器人工作情况及训练过程参数监控的需求,设计出了基于网络的康复机器人远程监控系统。主控机用来实现对康复机器人的实时控制、视频图像训练信息的来源进行采集和 Internet网络交互数据。客户机可以在有互联网的环境下的任何地点,通过视频在线操控虚拟样机和回馈参数监视康复机器人的运行状态,给康复机器人发送命令,并在线调整康复机器人的控制参数。
2)实时操作评估
下肢康复训练机器人由往复式运动机构和踝关节姿态控制机构组成,机构包括左腿机构和右腿机构,两部分按180°相位关系呈对称式布置。在工作过程中往复机构带动受训者双腿做屈伸运动,实现髋关节和膝关节的运动训练。同时,踝关节机构以一定运动规律带动踝关节转动,从而实现了下肢各个关节的运动训练和腿部肌肉的锻炼。通过控制系统根据患者身高和患病情况的不同来控制往复行程和转角范围的大小,来满足患者的训练要求,合理地完成每个训练过程。
 设为首页
设为首页  加入收藏
加入收藏
